Contact
igus® Ireland
igus® Ltd.
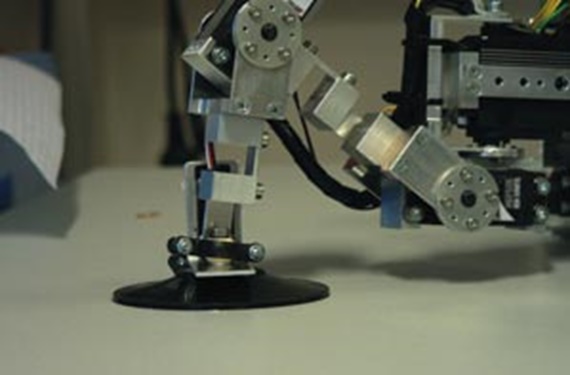
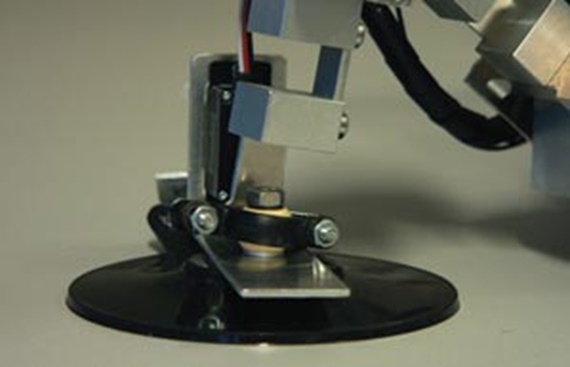
So a suction system was developed by which the climbing robot can be stopped on the disk completely passively, which means without using energy. For this purpose, simple "passive" suction cups are pressed with the normal locomotor system on the disk and thereby evacuated.
For the movements of the individual legs difficult to coordinate, the low-weight lubricant-free igubal® pillow block bearing is used, the individual piece weighing not more than two grams.
Prof. Dr.-Ing. Werner Brockmann, Osnabrueck University